Gazebo、Rviz 结合 ORB-SLAM3 实现运动规划及定位
基于以下内容,详见博客链接
参考链接
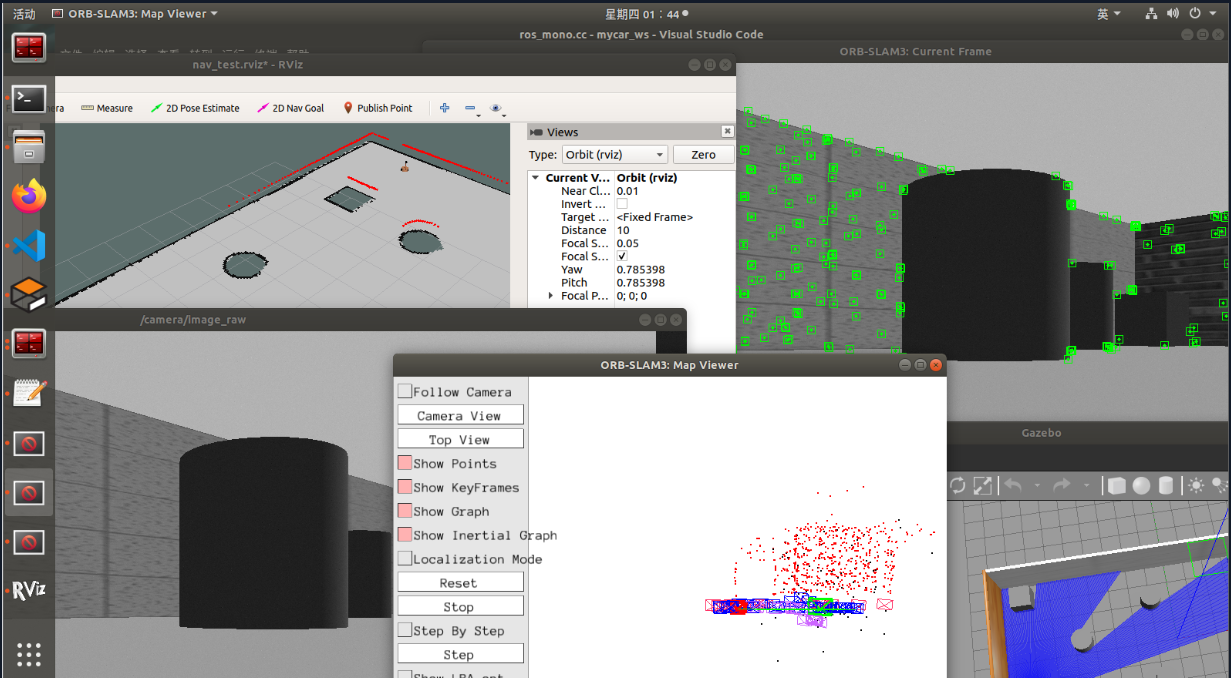
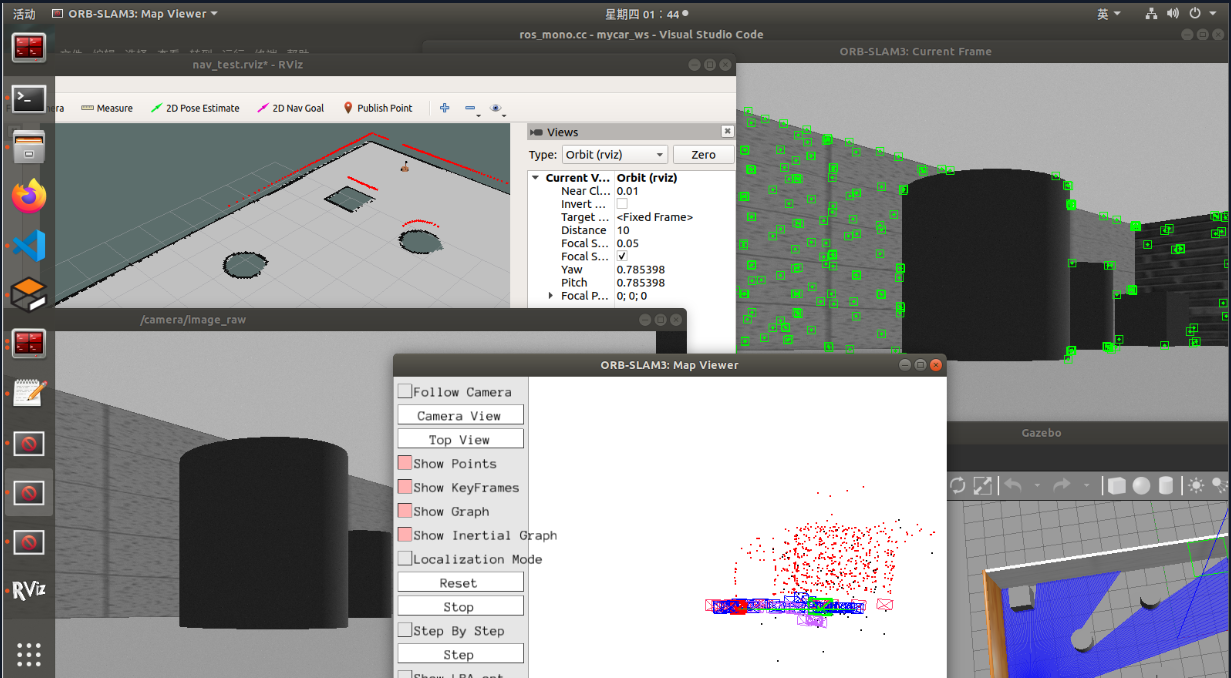
成果图
STEP1: 安装摄像头驱动
(1)笔记本摄像头
sudo apt-get install ros-melodic-uvc-camera
(2)USB摄像头
sudo apt-get install ros-melodic-usb-cam
STEP2: 安装image相关功能包
sudo apt-get install ros-melodic-image-*
sudo apt-get install ros-melodic-rqt-image-view
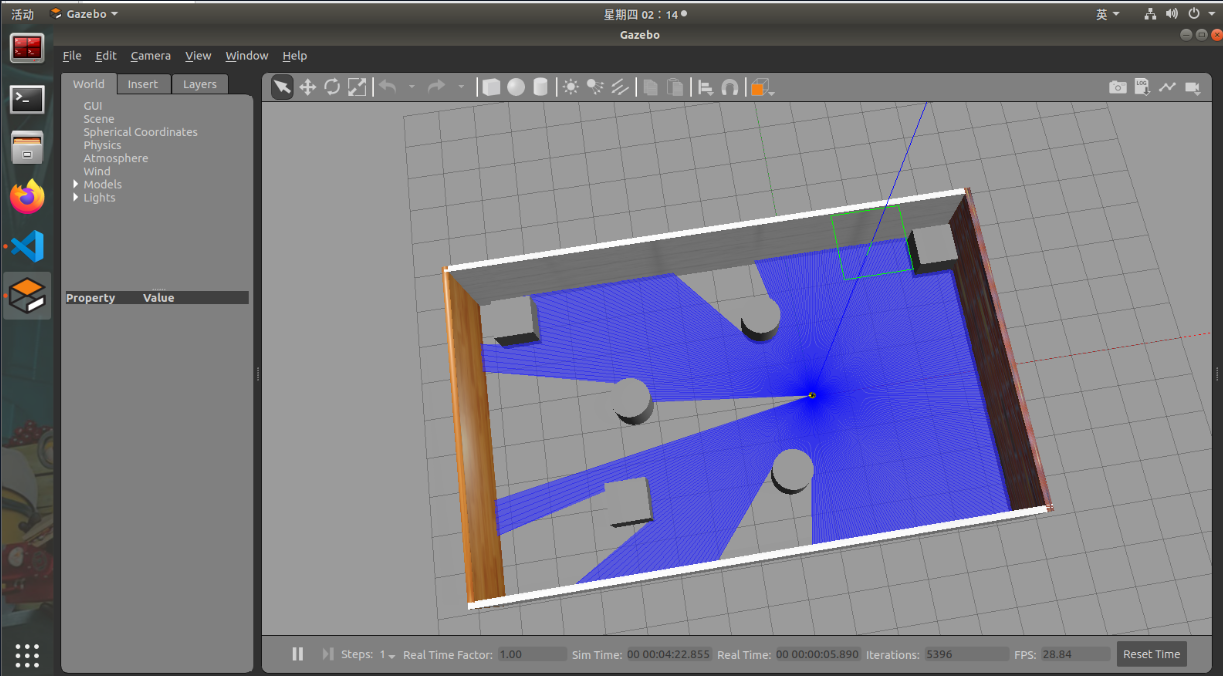
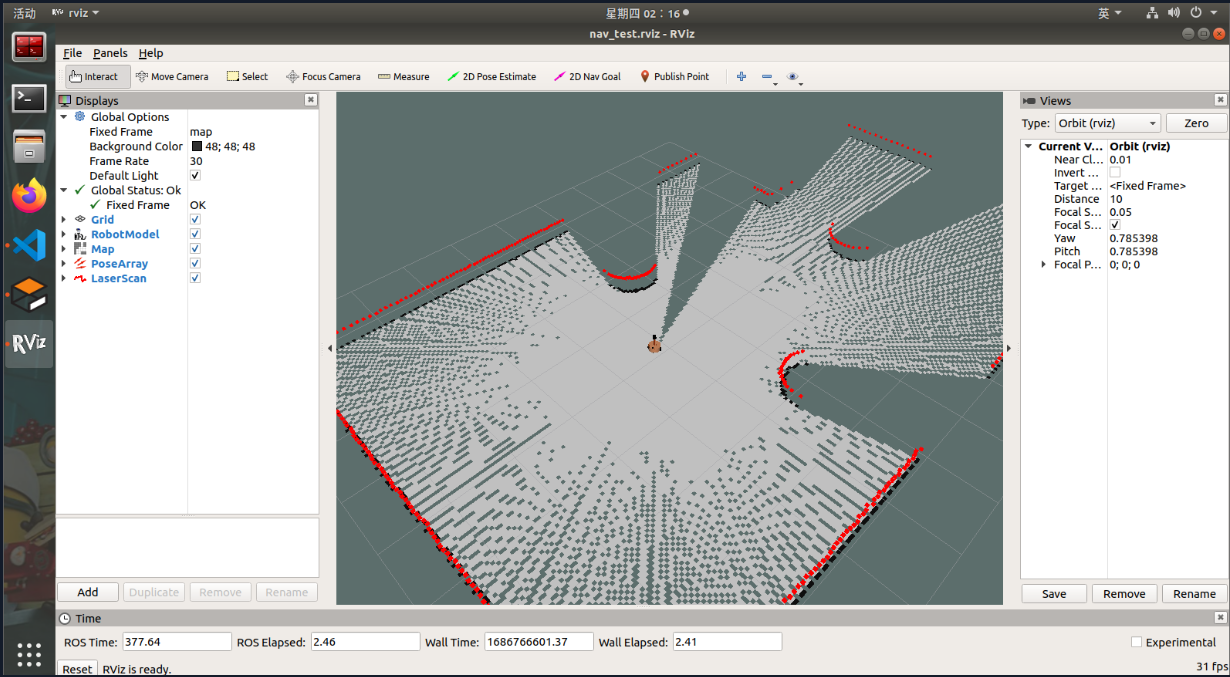
STEP3: 启动 gazebo 仿真环境
source ./devel/setup.bash
roslaunch mycar environment.launch

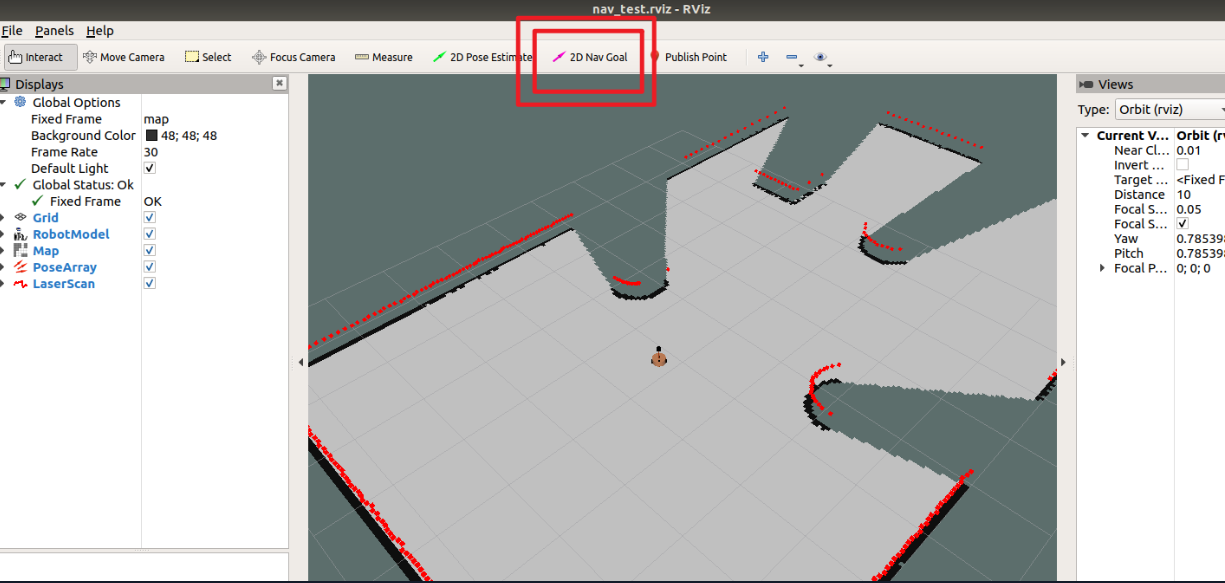
STEP4: 启动 rviz 相关节点
source ./devel/setup.bash
roslaunch nav_demo nav07_slam_auto.launch

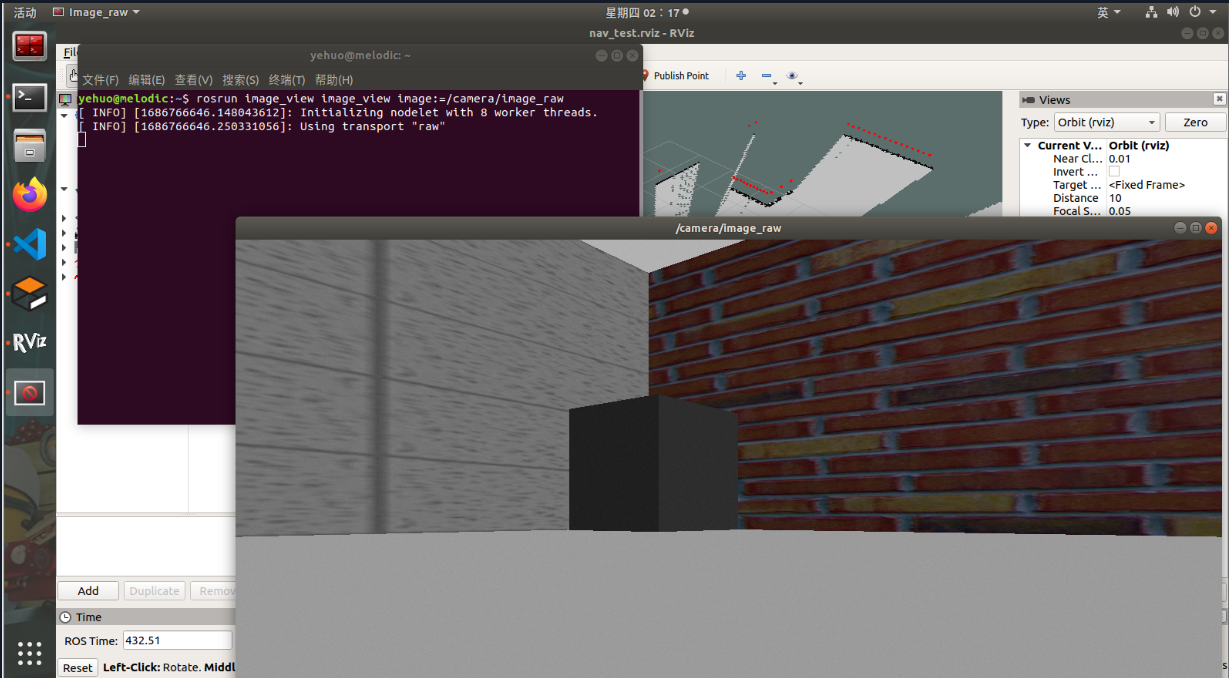
STEP5: 启动相机节点
rosrun image_view image_view image:=/camera/image_raw
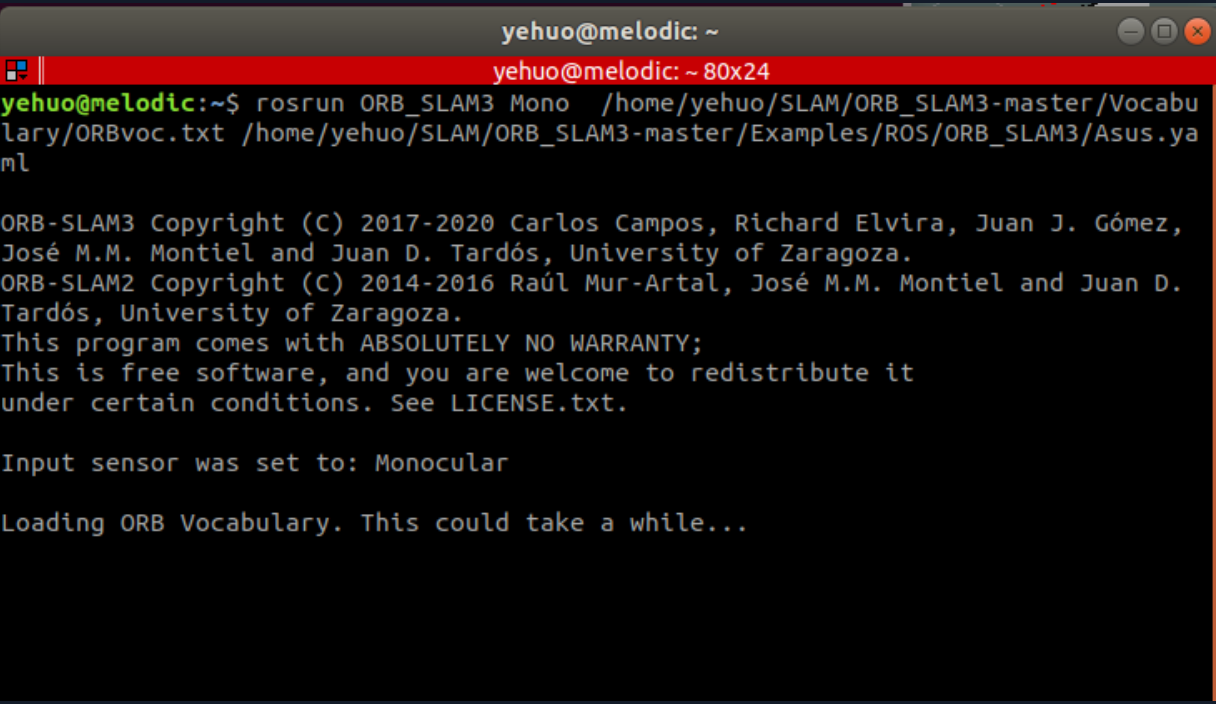
STEP6: 启动 ORB-SLAM3
rosrun ORB_SLAM3 Mono /home/yehuo/SLAM/ORB_SLAM3-master/Vocabulary/ORBvoc.txt /home/yehuo/SLAM/ORB_SLAM3-master/Examples/ROS/ORB_SLAM3/Asus.yaml
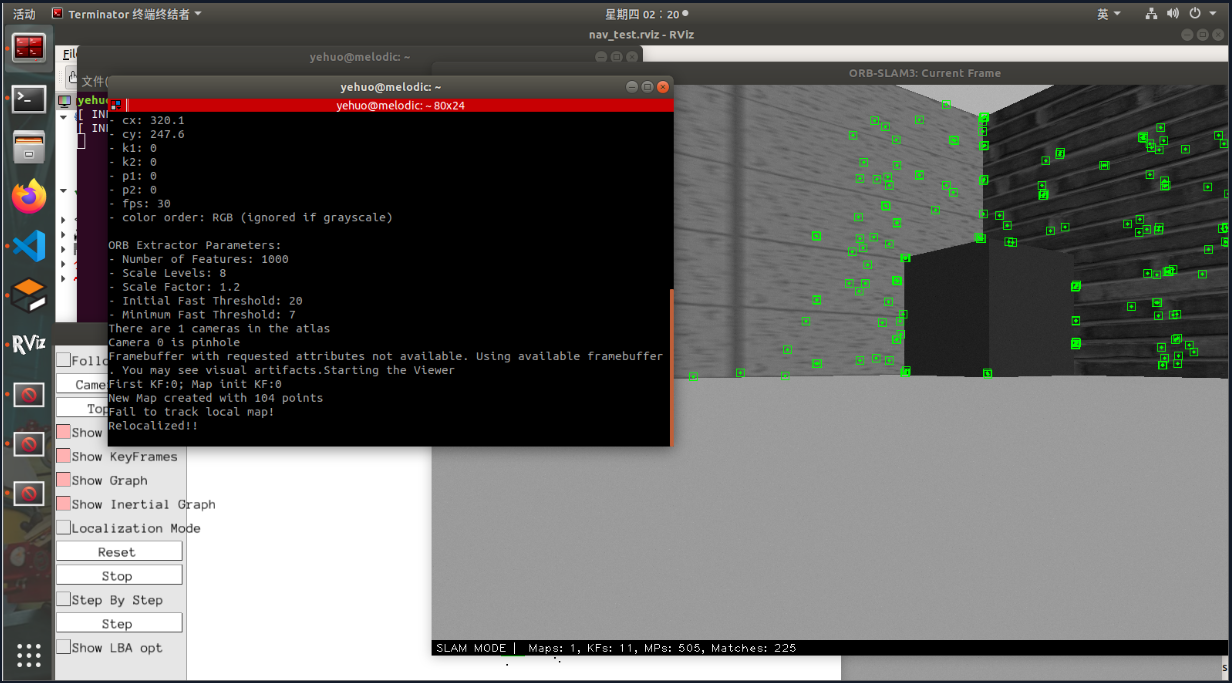
STEP7: 测试
测试小车运动规划以及定位功能