 通过Point Pair Feature进行2D图像匹配
通过Point Pair Feature进行2D图像匹配 @article{BertramDrost2010ModelGM,
title={Model globally, match locally: Efficient and robust 3D object recognition},
author={Bertram Drost and Markus Ulrich and Nassir Navab and Slobodan Ilic},
journal={computer vision and pattern recognition},
year={2010}
}
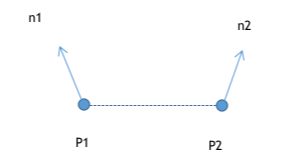
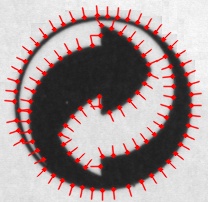
要想将ppf用于2D图像中,首先需要提取和点云类似的离散点和法向。对应在2D图像中,我们使用图像边缘和梯度方向 ,可以通过Canny算法得到。
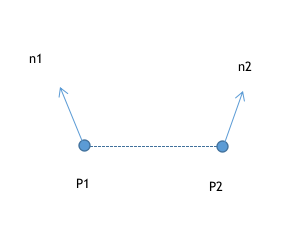
计算ppf的过程和3D中完全一致
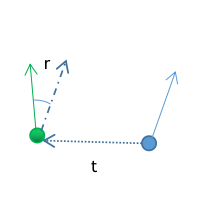
2D图像中对象的位姿包含三个自由度,平移(x,y)和旋转角度。在hash匹配后根据模板中的参考点和场景中的目标点的位置和梯度方向对齐即可计算出目标位姿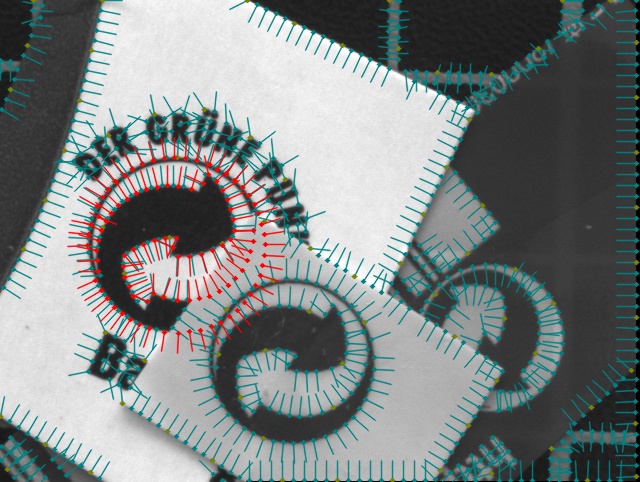
由于梯度的计算精度、以及场景的变化因素,经过ppf匹配后的结果会有一定的误差,可能需要经过更进一步的处理(如:ICP)才能满足需求
